
{kind=link}
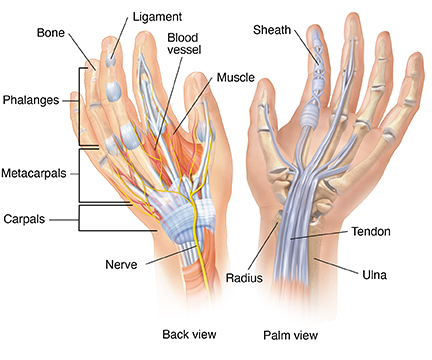
Dhealthwellness.com – The human wrist is an intricate, multi-bone structure that connects the forearm and the palm. It is formed by the intertwining of three small bones called carpals and a double row of small bones called the radius and ulna. These bones form the wrist joint, which provides three degrees of freedom. The wrist’s different parts are connected through the carpal tunnel and have a series of joints and muscles. The wrist is also comprised of a complex, articular disk and two joints that move the forearm.
Causes of Wrist Injury
A common is an overuse injury. Injuries to the wrist can damage the ligaments, tendons, muscles, and nerves. In addition, a physical impact or fall can result in wrist joint pain. In severe cases, wrist injuries can lead to crookedness and deformity. Injuries to the wrist may require surgery and immobilization while the bones heal. Injuries can also occur from repetitive stress, such as typing.
In the 1990s, Miyake et al published a finite element model of wrist stresses. This model included all the carpal bones and the distal ends of the ulna and radius. These models are still the best available tools for understanding how the wrist works in real life. The human wrist is a complex, intricate structure, and biomechanics has only begun to uncover its mechanics. With these models, we can determine the most accurate way to treat a wrist injury and enhance patient quality of life.

The three-dimensional model of the human wrist allows us to understand how the wrist works and evaluate a wide range of surgical reconstructive procedures. The high-speed stereo cinematography system used in this study used light-emitting diodes in the carpal bones at key ligamentous attachment points. The force transducer then produces kinetic data and records the force on the bone surface. By measuring the force and motion simultaneously, we can accurately assess the human wrist.
Variables Affecting Human Wrist
The study collected data on all subjects. Angle-specific differences were observed for several parameters. In Table 1, the results of the ANOVAs were listed, with absolute values and their standard deviations. Bonferroni corrections were performed to account for these differences. Similarly, the results of posthoc comparisons are also provided. They show that there are differences in the angles of the wrist. This study highlights the importance of a wide range of variables that affect the human wrist.
During flexion, wrist flexors are primarily activated by the first supramaximal electrical stimulus. These muscles are primarily activated during wrist flexion, so the contribution of the second supramaximal electrical stimulus to torque summation is greater at short lengths of the muscles. Similar results have been obtained with plantar flexors. It has also been shown that torque summation is mediated by the length-dependent sensitivity of contractile and elastic elements. This is the reason why the first electrical stimulus takes up the slack during wrist flexion.
The Human Wrist consists of eight small bones (called metacarpal bones) that articulate with the carpals. The digits are composed of 14 phalanges (phalanges). Amphibians and fish ancestors also possessed small wrist bones, with cartilaginous fin rays in the area of the tetrapod fingers. Some other tetrapods possessed two wrist bones, including the ulna and the intermedium.
Wrist Joint and Ligament Complex System
The human wrist is a complex joint structure that allows for dorsopalmar flexion and radioulnar deviation. These movements are made possible by the complex system of wrist joints and ligaments. Radiocarpal and intercarpal contacts provide intercarpal displacement between the carpal bones. Intercarpal and ulnar joint positions are also involved in the carpal and ulna, which are connected by specific ligamentous interconnections.
Researchers have shown that the MVT of the wrist flexors is lowest when the joint is flexed or extended. The MVT in different angles was determined by the interplay between neural and muscular contractile factors. The pennation angle of the muscle fibers determines the direction of muscle force vectors. In this study, participants performed isometric wrist flexions against a manipulandum while using a dynamometer.
Reference: